三屏六轴赛车模拟器是当前商用体验馆、驾校实训、赛车竞技培训领域主流高端仿真设备,其核心竞争力在于视觉系统与六自由度动感平台的深度协同,突破传统单屏设备视野局限、体感与画面割裂的痛点,构建接近真实赛车座舱的全方位沉浸体验。视觉沉浸并非单纯依靠三块显示屏扩大画面范围,而是由三屏全景显示硬件架构、实时视景渲染引擎、六轴动感运动补偿算法、人体感官协同机制四大体系共同作用,通过覆盖人眼全视野、消除画面断层、同步视觉动态与身体前庭感知,弱化 “观看屏幕” 的割裂感,让使用者大脑将虚拟画面判定为真实行车环境。本文从硬件结构、渲染技术、运动协同、感官融合、工程优化五大维度,完整拆解三屏六轴赛车模拟器视觉沉浸感的整套实现逻辑,全文约 3000 字。
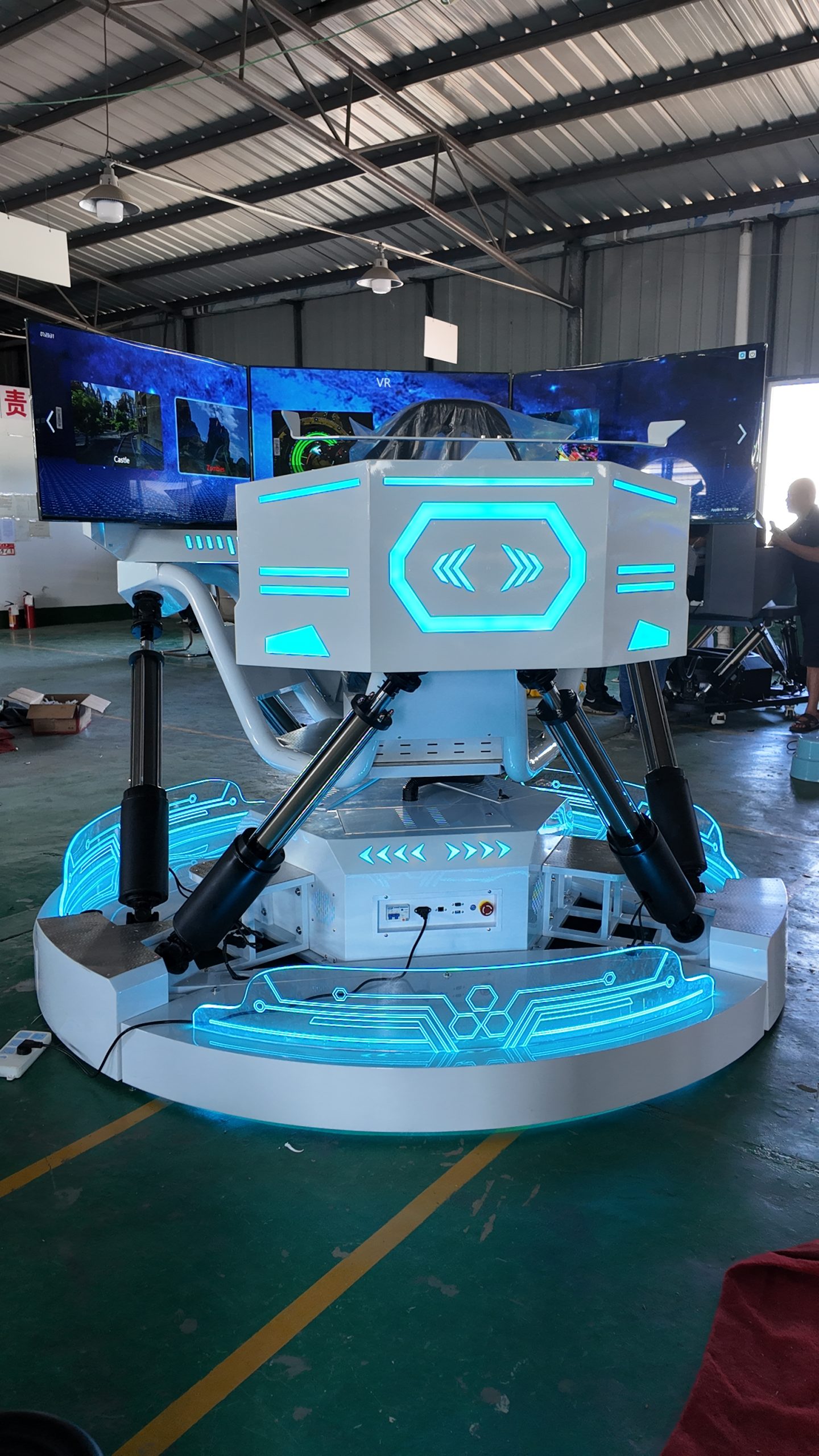
三屏六轴赛车模拟器整机

三联屏驾驶视野
一、视觉沉浸的底层逻辑:人眼视野与感官匹配原理
人类真实驾驶赛车时,视觉感知分为中心清晰视野与周边余光视野两大区域:人眼中心 30° 范围具备高分辨率识别能力,用于判断赛道弯道、前车距离、路肩标识;左右各 70° 余光视野无精细分辨力,但可捕捉侧向车辆、护栏、后视镜动态,形成空间包围感,二者共同构建完整行车空间认知。
传统单屏赛车设备仅覆盖 40°-60° 中心视野,完全丢失侧向余光信息,使用者只能通过主动转头观察两侧,大脑会持续意识到 “画面边界存在”,沉浸感大幅断裂。而 VR 头显虽能实现全景视野,但存在画面畸变、眩晕、佩戴闷热、多人排队运维成本高等商用短板。三屏显示架构折中解决视野覆盖问题,搭配六轴动感平台修正视觉与体感时差,是兼顾清晰度、舒适度、商用稳定性的最优方案。
视觉沉浸的核心判定标准是感官一致性:当画面中车辆加速、过弯、颠簸时,人体前庭系统必须同步接收对应的位移、倾斜、振动体感,若画面动态与身体运动存在超过 15ms 延迟,大脑会产生视觉 – 前庭冲突,直接出现眩晕、出戏感。三屏负责提供完整空间视觉信息,六轴平台负责匹配画面动态生成物理体感,二者联动才是沉浸式体验的核心根基,单一硬件无法独立实现高拟真视觉沉浸。
二、三屏全景显示硬件体系:构建 160°-180° 无间断环绕视野
三屏系统是视觉沉浸的载体,通过支架机械结构、屏幕硬件选型、画面拼接校正三大模块,消除单屏边界割裂,复刻真实赛车座舱全景视野,从物理层面包裹使用者视线。
(一)三联屏机械布局:贴合人眼生理视角
主流商用模拟器采用 ** 中屏垂直正对驾驶位、左右屏幕向内倾斜 30°-45°** 的 U 型环抱布局,三块同尺寸 27/32/42 英寸高清显示器形成连续弧形视场,整体水平总视场角可达 160° 至 180°,完美复刻职业方程式赛车驾驶舱视野范围。
- 中心主屏:对应人眼核心清晰视野,完整呈现赛道正前方直道、弯道顶点、前车轮廓,承担 80% 行车信息输出;
- 左侧副屏:覆盖驾驶员左前方余光,显示左侧车道、超车车辆、左后视镜虚拟画面;
- 右侧副屏:覆盖右前方侧向视野,呈现路肩、护栏、右侧超车、弯道外侧空间。
支架采用一体化铝合金刚性结构,固定三块屏幕相对夹角、观看距离,标准视点距离屏幕 2.2m-2.6m,匹配人眼透视参数,避免画面近大远小严重失真;屏幕垂直高度与真实赛车挡风玻璃对齐,上下垂直视场覆盖 35°,完整包含坡道起伏、高架、隧道顶部等高低场景,消除上下视野盲区。
(二)屏幕硬件选型:消除画面断层,保障视觉统一性
屏幕硬件参数直接决定沉浸感下限,设备统一采用窄边框电竞级显示器,核心选型标准有三点:
第一,等规格无差异面板。三块屏幕型号、刷新率、色域、亮度完全统一,杜绝色彩断层、明暗不均。高端机型搭载 4K OLED 面板,黑色画面纯黑无灰雾,夜间赛道、隧道场景光影层次真实;商用基础款使用 144Hz 高刷 IPS 屏,单屏分辨率 3840×2160,动态画面拖影、模糊现象大幅降低。
第二,超窄边框控缝工艺。单屏内边框宽度控制在 6mm 以内,三块屏幕拼接总缝隙小于 12mm,搭配软件边框补偿算法,抵消物理边框造成的画面断裂。若边框过宽,视线扫过左右屏幕时会出现明显视觉分割,瞬间打破虚拟空间连续性。
第三,低延迟显示面板。屏幕输入延迟控制在 5ms 以内,避免画面渲染输出滞后于六轴平台运动信号,从硬件源头减少视听体感不同步。
(三)显卡分屏渲染与边框校正技术
计算机端搭载高性能独立显卡,通过 Nvidia Surround、AMD Eyefinity 多屏融合技术,将三块屏幕合并为单一完整显示输出,渲染引擎统一计算 180° 全景画面,再分割输送至三块屏幕同步输出,而非三块屏幕独立渲染拼接,保证透视逻辑完全统一。
边框补偿是三联屏沉浸关键算法:软件根据屏幕边框物理宽度,对画面拼接处像素进行拉伸填充,虚拟抵消边框遮挡区域。驾驶员肉眼观察时,赛道、护栏、车辆等连续物体可完整跨三块屏幕呈现,不会在拼接位置出现物体截断,实现 “视觉无缝全景”。同时引擎支持自定义视场角(FOV)参数,根据模拟器屏幕尺寸、夹角精准匹配人眼透视,避免两侧画面拉伸变形,保障距离判断精准度,大幅提升赛道走线、超车预判真实感。
三、实时三维视景渲染引擎:塑造高保真虚拟行车视觉环境
硬件三屏仅提供显示载体,视景渲染引擎负责生成动态、真实、可交互的虚拟赛道画面,从画面内容层面强化沉浸,主要分为场景建模、动态光影、车辆物理视觉反馈三大模块。
(一)高精度赛道与环境数据库
引擎内置海量标准化赛道资源,包含 F1 专业赛道、城市公路、山区盘山路、拉力砂石路、雨天 / 雪天 / 雾天多气象场景,道路路面纹理 1:1 还原沥青、砂石、积水、结冰反光效果,路面标线、护栏、路牌、观众看台等细节采用 4K 高精度模型。系统实时加载道路高程数据,坡道、起伏路面画面同步匹配六轴平台升降、俯仰运动,驾驶员视觉上看到上坡的同时,身体同步感受到抬升体感,形成双向感官印证。
同时视景系统搭载全局动态交通 AI,赛道内生成多辆 AI 赛车,具备超车、避让、刹车、打滑等自主行为,左右侧屏幕持续呈现侧向车流动态,填满人眼余光视野,避免空旷画面带来的虚假感。
(二)动态光影与实时环境渲染
渲染管线采用实时光追、全局光照技术,实现昼夜切换、阳光角度偏移、车灯光照反射、积水路面镜面反射等动态光影效果。夜间模式下,赛车大灯光束会随转向同步左右摆动,光束照射范围、明暗渐变贴合真实光学逻辑;隧道内明暗交替、树荫光影晃动等细节持续刺激视觉感知,弱化屏幕电子画面的塑料质感。
画面刷新率锁定 90Hz-120Hz,每帧渲染间隔低于 11ms,配合高刷屏幕消除高速行驶时画面撕裂、拖影。车辆高速过弯、极速冲刺时,画面动态模糊根据车速动态调节,模拟人眼高速运动下的视觉虚化效果,进一步强化速度感沉浸。
(三)车辆动力学联动视觉反馈
视景渲染与整车物理引擎实时互通,车辆每一项力学状态都会转化为视觉画面变化:加速时车头轻微上扬、轮胎轻微形变;急刹时车头下沉、刹车片发红冒烟;高速过弯车身侧倾、轮胎摩擦产生烟雾;路肩颠簸时车身上下小幅跳动,碎石飞溅、轮胎纹路贴合路面形变。所有视觉变化数据同步输送至六轴运动控制器,画面动作与平台运动指令同源输出,保证视觉变化与体感变化时序完全统一。
四、六轴动感平台:视觉沉浸的感官协同核心(画面 – 体感同步机制)
三屏提供视觉信号,六自由度 Stewart 动感平台负责输出对应的物理体感,依靠洗出滤波算法、倾斜协调原理、毫秒级同步传输,消除视觉与前庭感知冲突,完成 “视觉欺骗大脑” 的沉浸闭环,是区别于普通三联屏电脑、三轴模拟器的核心技术壁垒。

六轴Stewart平台结构示意
(一)六自由度运动覆盖,匹配全场景视觉动态
六轴平台由固定基座、上承载座舱、六组伺服电动缸与万向球铰构成,可独立实现三个平移维度(前后纵移 Surge、左右横移 Sway、上下升降 Heave)、三个旋转维度(俯仰 Pitch、横滚 Roll、偏航 Yaw)复合运动,完整复刻赛车所有动态姿态,一一对应三屏画面视觉变化:
- 加速画面匹配俯仰前倾:屏幕画面车辆向前冲刺时,平台小幅后倾,利用重力分力模拟推背感,视觉向前的速度感与身体向后的惯性体感互相强化;
- 刹车画面匹配俯冲下沉:急刹画面车头下沉,平台同步向前俯仰、小幅下沉,还原制动俯冲体感;
- 过弯画面匹配横滚侧倾:屏幕车辆向左 / 右转弯时,平台同向侧倾,通过倾斜协调原理,用重力侧向分力模拟离心 G 值,大脑结合侧向车辆视觉,判定自身正在高速过弯;
- 颠簸坡道匹配升降位移:画面经过坑洼、起伏坡道时,六缸高频小幅伸缩,输出上下、左右细碎振动,视觉路面不平与身体颠簸同步;
- 打滑侧滑匹配偏航晃动:车辆失控打滑时,平台小幅左右偏航摆动,匹配画面车身甩尾视觉。
(二)洗出滤波算法:解决平台行程限制,持续同步视觉
六轴平台物理可移动行程有限(纵向 ±300mm、倾斜 ±15°),无法无限持续倾斜、平移。自研洗出滤波算法是实现长时间视觉体感同步的关键:当画面持续加速、长时间过弯时,平台先输出瞬时对应加速度体感,再缓慢回中复位,复位动作幅度极小,人体无法察觉,同时持续维持小幅倾斜补偿重力分力,在有限机械行程内,持续匹配长时间连续视觉动态,不会出现体感中断、画面与身体脱节的情况。
(三)毫秒级同步传输架构,杜绝视听体感时差
整套系统采用分层数据同步总线架构,数据流转链路为:驾驶员方向盘 / 油门操作采集→车辆动力学引擎计算车辆状态→同步输出两路同源数据,一路输送至三屏渲染显卡生成画面,另一路输送至六轴运动控制器驱动伺服电动缸。全链路数据传输延迟控制在 8ms 以内,画面输出与平台运动启动时差不超过 10ms,远低于人体能感知的 15ms 临界时差,大脑无法分辨视觉与体感先后顺序,自然将虚拟画面当作真实环境。
若缺少六轴同步体感,仅依靠三屏画面,人体前庭系统接收不到加速、转弯、颠簸信号,视觉信号与身体静态感知产生冲突,长时间体验极易疲劳、出戏,三联屏的视觉包围优势会大幅缩水。
五、多感官辅助系统:放大视觉沉浸的配套支撑
视觉并非单一感知通道,听觉、力反馈操控设备会协同三屏画面,辅助强化空间认知,进一步巩固视觉沉浸效果。
(一)环绕立体声音频同步
模拟器座舱搭载多声道环绕音响,声音参数随画面车辆状态实时变化:发动机转速声随车速同步升降、轮胎摩擦声根据路面材质切换、侧向超车声源从左右屏幕对应方向音响输出。听觉空间位置与三屏视觉画面空间一一对应,形成视听双重空间包围,强化画面真实空间感。
(二)力反馈方向盘与踏板视觉联动
直驱伺服方向盘实时输出转向阻力、路肩震动、打滑回馈,驾驶员转动方向盘时,三屏画面同步对应车辆转向角度,手部操控反馈、画面转向视觉、六轴侧倾体感三者完全同步,形成完整交互闭环。刹车踏板渐进式阻力匹配画面制动距离变化,进一步缩小虚拟与真实驾驶的感知差距。
六、商用设备视觉沉浸优化工程方案
针对体验馆、校园安全基地、驾培机构等商用场景,行业设备针对视觉沉浸做多重落地优化,解决长时间体验、多人轮换、环境干扰问题:
- 环境遮光结构:模拟器整机配备半包围遮光舱体,隔绝场馆外部灯光、人群视线干扰,消除外界画面光源割裂视线,使用者视野内仅保留三联屏虚拟赛道画面;
- 动态亮度自适应:屏幕亮度根据场馆环境光自动调节,白天强光场景提升屏幕亮度,夜间降低背光,避免画面过曝、泛白破坏光影真实度;
- 运动分级调节:针对青少年、初次体验者降低六轴运动幅度,保留基础同步体感,减少眩晕,同时不丢失三联屏全景视觉优势,适配中小学安全教育、科普基地使用场景;
- 标准化视场预设:内置驾校安全教学、青少年交通科普、专业赛车竞技三套 FOV 参数,一键切换适配不同使用需求,兼顾实训教学与娱乐体验。
七、总结
三屏六轴赛车模拟器的视觉沉浸感,是一套 “硬件视野搭建 — 软件画面渲染 — 六轴体感同步 — 多感官协同” 的完整技术体系,并非简单屏幕与动感平台的叠加。三屏显示系统从物理层面打破单屏视野局限,构建 180° 环绕全景视觉,消除画面边界割裂;高精度实时渲染引擎填充具备完整光影、物理动态的虚拟行车环境,提升画面拟真度;六自由度 Stewart 平台依靠同步算法、洗出滤波、倾斜协调原理,输出与画面完全匹配的身体体感,解决视觉 – 前庭感知冲突;音频、力反馈操控系统作为辅助,多维度巩固大脑对虚拟空间的真实判定。
相较于纯 VR 设备、单屏动感模拟器、家用三联屏电脑,三屏六轴架构平衡了视野包围感、画面清晰度、长时间体验舒适度与商用运维稳定性,广泛应用于青少年交通安全科普基地、校园 VR 安全体验馆、驾校模拟实训、赛车文旅体验馆等场景。其视觉沉浸实现逻辑,核心是遵循人体视觉、前庭感知生理规律,通过软硬件协同消除虚拟与现实的感官断层,让使用者完全代入虚拟赛车驾驶场景,实现高还原度、高交互性的仿真驾驶体验。

